深圳市维品佳科技有限公司
手机:152-1871-9208
地址:深圳市福田区华强电子世界3号楼一楼

率能SS8812T-ET-TP内部集成了两个NMOS H桥电机芯片替换DRV8812PWPR
SS8812T-ET-TP应用信息:
SS8812T-ET-TP可以用来控制一个双极步进电机,PWM接口控制输出,电流控制可以通过内部电流调节电路来实现。详细的故障报告是通过内部保护电路和nFAULT引脚来实现。
设备功能模式:
H桥控制:
AENBL使能控制A通道输出,逻辑高电平,A通道工作;APHASE控制A通道电流方向,逻辑高电平,电流由AOUT1流向AOUT2。同理,BENBL使能控制B通道输出,逻辑高电平,B通道工作;BPHASE控制B通道电流方向,逻辑高电平,电流由BOUT1流向BOUT2。表1显示了逻辑。
| xENBL | xPHASE | xOUT1 | xOUT2 |
| 0 | X | Z | Z |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
注:输入控制引脚均有约100kΩ内部下拉电阻。
衰减模式:
在PWM电流斩波期间,H桥开启使得通过电机绕组的驱动电流上升至斩波阈值。 如下图所示的状态1,显示的为当xPHASE为高时的电流流向。
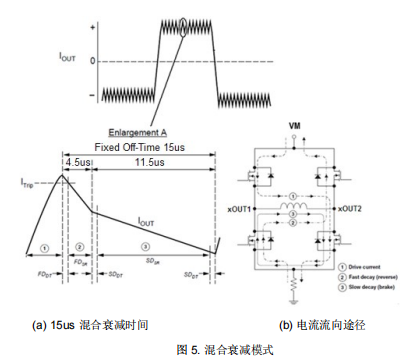
SS8812T支持快衰减,慢衰减以及混合衰减模式。慢衰减,快衰减以及混合衰减模式通过DECAY引脚的状态来选择:逻辑低电平则选择慢衰减,悬空(或中间电平)则选择混合衰减,逻辑高电平选择快衰减模式。DECAY引脚内部有上拉电阻约130KΩ和下拉电阻约80KΩ。如果PIN保持悬空,则设置为混合衰减模式。注意DECAY引脚是同时设置两个H桥的衰减模式。设定总衰减时间为固定时间15us,在该衰减时间的30%为快衰减,然后在剩余时间内切换为慢衰减,直到下一个新的周期开始。
详细设计过程:
(a)电流调节
对于驱动步进马达,设定的满量程电流(IFS)是通过任何一个绕组的最大驱动电流。数量取决于xVREF参考电压和感应电阻值(RSENSE)。在工作中,IFS定义当前最大电流台阶的斩波阈值(ITRIP)。SS8812T增益设置为5V/V。
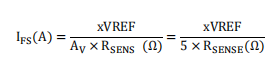
为实现I FS=1.25A,R SENSE为0.2Ω,xVREF应该设定1.25V。
(b)衰减模式
SS8812T提供三种不同的衰减模式:慢衰减,快衰减,和混合衰减。通过电机绕组的电流使用固定频率PWM方案调节。这意味着在任何驱动阶段,当电机绕组电流到达电流斩波的阈值(ITRIP),芯片将进入三个衰减模式之一,直到PWM周期结束。之后,一个新的驱动阶段开始。消隐时间,tBLANK,定义当前斩波的最小驱动时间。ITRIP在tBLANK时间内被忽略,因此绕组电流可能超过斩波的阈值。
(c)感应电阻
为了获得最佳性能,敏感电阻是很重要的:
表面贴装
低电感
额定功率足够高
紧挨马达驱动芯片
通过检测电阻消耗的功率等于Irms 2xR。例如,如果电机平均电流为2A和使用100mΩ检测电阻时,电阻会消耗2A²×0.1Ω=0.4W。功率随电流等级迅速增加。
电阻器通常在某些环境温度范围内有一个额定功率,遵循环境温度上升,额定下降功率的曲线。当PCB板与其他部件共存时,产生的热量和余量应该相加。在最终的系统中,最好是测量实际的电阻温度。还有功率MOSFET,因为它们通常是最热的元件。
由于功率电阻比标准电阻器大,而且价格昂贵,所以通常采用在感测节点和接地之间并联多个标准电阻。这就均匀地分散电流和热量损耗。


 扫描二维码
扫描二维码